杏彩体育·(中国)官网登录入口_app下载/注册(XingCai)
全国咨询热线:
18677927586



 新闻资讯
新闻资讯 行业动态
行业动态汽车的新能源化、智能化除了在动力方面给汽车带来根本性的变化,在汽车底盘线控化方面也成为一种发展趋势。其中电子液压制动(Electronic HydraulicBrake,EHB)和电子机械制动(Electronic MechanicalBrake,EMB)系统,作为从人工驾驶到自动驾驶线控制动的桥梁,既保证了制动的有效性和可靠性,又满足了自动紧急制动(AEB)、自适应巡航(ACC)和自动驾驶对制动系统的要求。EMB/EHB系统最主要的特点是采用电动助力装置替代了传统机械制动系统的真空助力装置,这样减少机械结构的重量,使得汽车的制动系统具有重量轻、体积小、响应快、制动效果明显提高等优点。而且,在车辆电源故障的情况下,人力也可以提供一定的制动力,有失效备份功能。
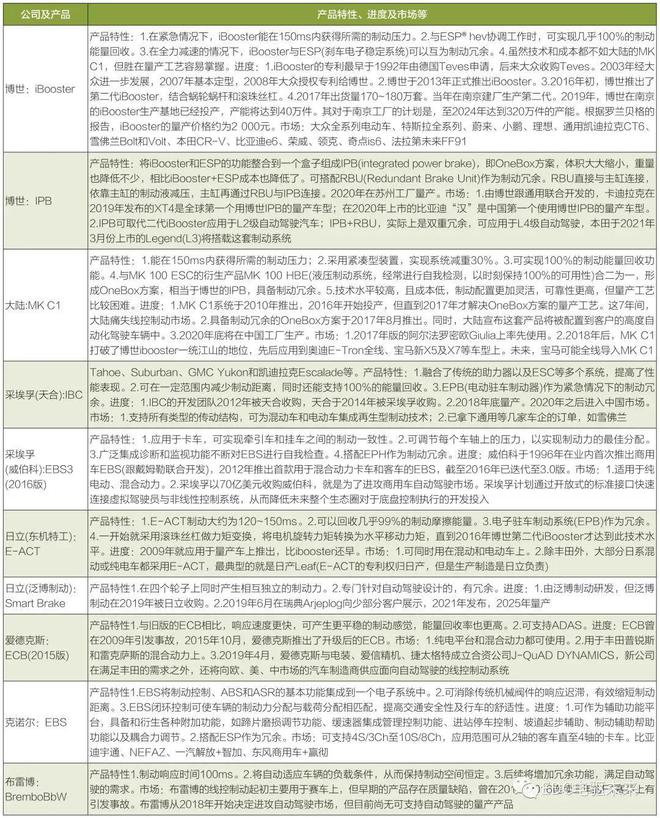
同时,制动踏板感觉可调、能实现制动踏板与执行机构之间的解耦,配合多种主动安全控制功能。并且,EMB/EHB系统在新能源汽车的制动系统中还可以利用驱动电机制动来实现能量回收再利用,明显地降低对清洁能源的消耗,延长汽车的行驶里程。因此,杏彩体育登录入口电控液压制动系统应用市场前景很广,国内外研究人员和知名汽车厂商都相继投入到EMB/EHB制动系统研发和整车配套中。表1所示为目前EHB系统的产品特性和配套市场。
为了全面系统了解EHB系统在整车上的性能表现,本文将在在进行EHB系统通用架构分析的基础上,以当前具有典型EHB系统的代表,即博世iBooster系统、智能集成制动IPB系统、MKC1系统和爱德克斯ECB系统在电动汽车和混合动力汽车上的运用为例,分析它们的工作原理以及软硬件的设计思想。
过去几十年,制动系统在功能和结构上不断丰富和完善,从最原始的制动减速到制动防抱死系统(ABS)纵向稳定控制,发展到电子制动力矩分配(EBD),到后来电子稳定程序系统(ESP)的横向稳定控制,对制动系统的改进和提高从未停止。表2总结了现代车辆对制动系统在功能和结构上的需求。

从表2可以看出,制动系统在最初满足基本制动需求的基础上增加了许多面向整车动力学、主动安全、能量优化、以适应电动汽车和智能汽车的新功能。这些功能使得制动系统变成了与整车安全、舒适、经济相关的重要子系统,因此,制动系统的设计变得至关重要。
由博世公司研发的机电伺服制动助力器(iBooster),以传统制动系统真空助力器原理为雏形,采用iBooster替代线年推出iBooster第二代产品,满足现代电动汽车和智能汽车制动系统的要求。
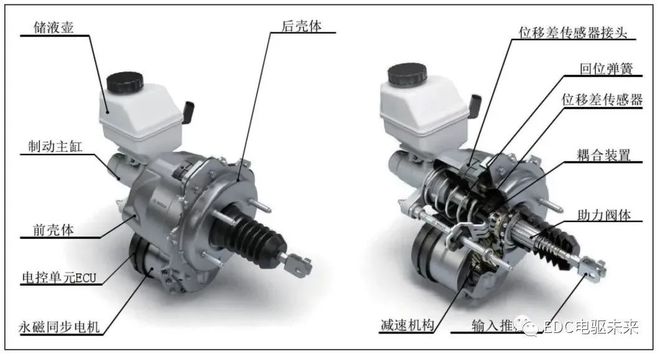
第二代iBooster整体结构图及剖面图如图1所示,主要由ECU、输入推杆、永磁同步电机(PMSM)、减速机构、耦合装置、回位弹簧杏彩体育、助力阀体、制动主缸总成及位移差传感器组成。第二代iBooster与第一代相比结构上有如下改进。
1)减速机构不同:iBooster一代具有两级减速机构,分别为蜗轮蜗杆和齿轮齿条。iBooster二代采用减速机构,分别为两级齿轮机构和一级螺母螺杆减速机构。
2)传感器不同:iBooster一代采用两个传感器,分别为电机转角传感器和助力器推杆绝对位置位移传感器。iBooster二代采用一个传感器,位移差传感器。
3)电机参数不同:iBooster一代电机具有18个定子线个磁极。iBooster二代电机具有12个定子线)体积及重量不同:

iBooster减速机构如图2所示,其主要由齿轮组组成:第一级齿轮组由电机齿轮及双齿轮中的大齿轮组成;第二级齿轮组由双齿轮中的小齿轮及轮毂齿轮组成,前两级齿轮副力矩传输方向都没有发生变化;第为滑动丝杠螺母组,由主轴螺母及螺杆轴组成,滑动丝杠螺母组结构简单、紧凑,降速比大,有自锁的功能,运动平稳,且能够保证和提高传动精度,此时力矩方向发生变化,由径向的旋转运动变为轴向的平动。
iBooster耦合装置如图3所示,主要由输入推杆、螺杆固定轴、橡胶反馈盘、阀体及阀体底座组成。在耦合装置中,阀体和橡胶反馈盘是最为关键的零件,其实物图如图4所示。当电机的伺服力经由减速机构传递到螺杆轴后,主轴螺母由于具有锁止机构不能向前移动只能转动,螺杆轴及螺杆固定轴向前移动,阀体座也向前移动,并与阀体的B面接触,伺服力就通过助力阀体作用于橡胶反馈盘的副面(外环面),而与制动踏板连接的输入推杆力直接作用于橡胶反馈盘的主面(内圆面)。橡胶反馈盘具有体积不可压缩特性,伺服力和踏板输入力通过橡胶反馈盘耦合在一起推动主缸活塞产生液压力。伺服力矩能够满足对不同助力比的调整需求。
iBooster在常规制动时,驾驶员踩下制动踏板,助力器通过集成的位移差传感器检测到驾驶员的制动需求,将此信息传输到中,计算出控制信号并作用在永磁同步电机上,通过减速机构传输扭矩,并与驾驶员提供的脚踏板力通过耦合装置一起推动主缸推杆产生制动液压力,制动主缸、储液罐与传统制动系统所用保持一致,液压调节单元使用ESP的部件。iBooster除了可以实现常规制动功能,还可以实现以下两种功能,如图5所示。
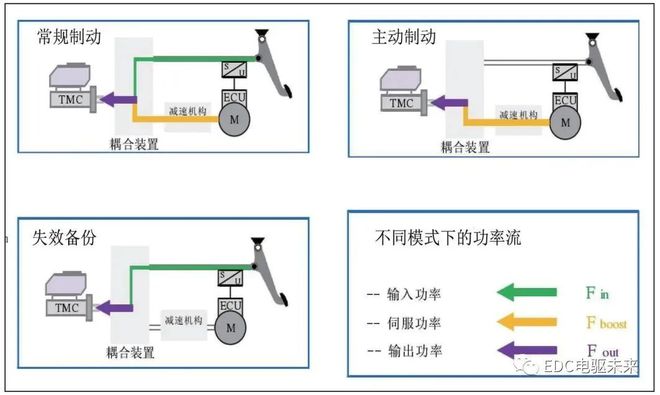
iBooster采用了双安全失效模式。第一道安全失效模式将两种故障情况考虑在内。如果车载电源不能满负载运行,那么iBooster则以节能模式工作,以避免给车辆电气系统增加不必要的负荷,同时防止车载电源发生故障杏彩体育。万一iBooster发生故障,ESP hev单元会接管并提供制动助力。在上述两种情况下,制动系统均可在200N的踏板力作用下提供0.4g的减速度,在更大踏板力乃至完全减速时同样如此。在第二道安全失效模式,如果车载电源失效,即断电模式下,则可通过机械推动力方式作为备用,驾驶员可以通过无制动助力的纯液压模式对所有四个车轮施加车轮制动,使车辆安全停车,同时满足所有法规要求。
现在驾驶员已经习惯带有真空助力器的传统制动系统的踏板感觉,要理解和体验iBooster电子机械助力器的特性,在此首先回顾真空助力器的工作原理和助力特性。
真空助力器是一种伺服制动助力装置,利用发动机进气歧管产生的真空度作为伺服动力源,靠真空和大气在前、后两腔产生的压力差进行助力。
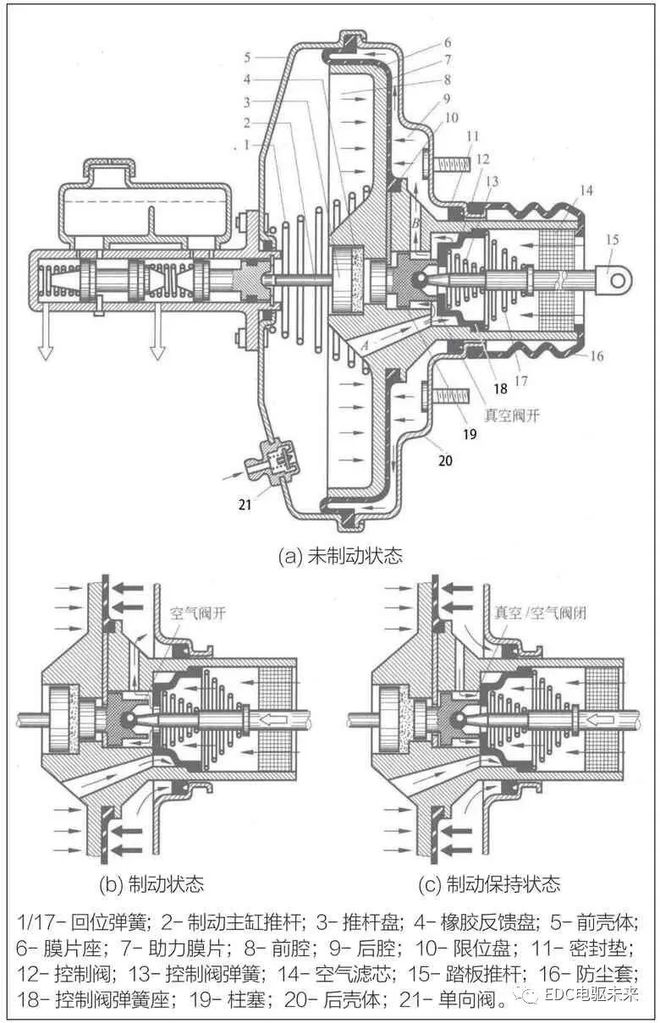
线所示,其后端固定在汽车前围板上,输入推杆和制动踏板连接,前端与制动主缸连接,真空单向阀和发动机的进气歧管连接,为真空助力器提供真空。控制阀阀体和控制阀门弹簧座之间的间隙定义为真空阀,柱塞和控制阀门弹簧座之间的间隙定义为空气阀。两个阀体的作用为控制伺服前腔、后腔及外界大气之间的通断:当只有真空阀打开时,伺服前腔和后腔连通,且都为真空状态没有压力差;当空气阀打开时,空气经过滤芯进入伺服后腔;当真空阀和空气阀都关闭时,伺服前腔、后腔及大气之间相互隔绝。在柱塞和主缸推杆之间是橡胶反馈盘,右面中心区域受到柱塞的推力,外环区域受到控制阀阀体的推力,其左侧受到制动主缸的液压反作用力。真空助力器的工作原理可以分为以下几个过程。
当驾驶员踩下制动踏板后,输入推杆逐渐克服其回位弹簧的弹力,此过空助力器的状态和未制动状态下保持一致。克服回位弹簧弹力后,输入推杆继续向前移动,由于输入推杆和柱塞之间通过球头铰接在一起向前位移,控制阀阀体和阀门弹簧座组成的真空阀的间隙逐渐减小,柱塞和阀门弹簧座一直保持接触,空气阀没有被打开。当控制阀阀体和阀体弹簧座接触的一瞬间,真空阀被关闭,前后两腔不再连通。当柱塞克服间隙与橡胶反馈盘中心区域接触时,继续向前的阀体弹簧座则抵在控制阀阀体上,而柱塞继续向前移动推动橡胶反馈盘,中心区域呈现凹下状态,这样,在柱塞和阀体弹簧座之间开始产生间隙,空气阀被打开,外界的大气经过滤芯进入到后腔,在前、后腔之间产生一定的压力差,并通过控制阀体作用在橡胶反馈盘的外环区域,该推力和驾驶员的输入力一起作用在制动主缸推杆上,从而产生制动压力。伺服前腔的压强一般为0.067MPa,而大气压强为0.1MPa,前、后两腔在这个过程中的压力差是不变的,而膜片的面积也是定值,因此,最大伺服力存在最大值。在达到最大值之后,不再产生助力作用,不计摩擦力等的作用,此时驾驶员输入多少力,主缸推杆的输出力就增加多少,如图6(b)所示。
驾驶员将制动踏板踩到一定深度并保持不变时,踏板力不再增加,柱塞不再压缩橡胶反馈盘中心区域,由于伺服助力的作用,橡胶反馈盘中心凹下部分慢慢的变平回到初始位置,直至各处的变形量都相同,柱塞向后移动与阀体弹簧座接触,空气阀被关闭,此时真空阀也处于关闭状态,前、后腔被隔断,真空助力器处于力平衡状态。如图6(c)所示。
在真空助力器的工作过程中,最为重要的是空气阀和真空阀的开闭、反馈盘的变形和前后腔的连通状态。表4列出了真空助力器工作过程中关键零部件工作状态。
以驾驶员制动踏板力为横坐标,主缸压力为纵坐标可以得到如图7所示的真空助力器一个完整制动过程中的助力特性曲线 真空助力器工作过程中关键零部件工作状态

驾驶员踩下制动踏板后并不是能马上推动制动主缸推杆产生压力,而是当踏板力大于某个阈值时才开始产生液压力,这个阈值就称作真空助力器的始动力。始动力的大小基本等于输入推杆回位弹簧的预紧力。始动力可以防止驾驶员误踩制动踏板或汽车较大的振动所导致的错误制动,该值一般情况下应该小于110N。始动力过大,真空助力器的反应时间过长,灵敏度降低;始动力过小,驾驶员会失去脚感。
当踏板力克服始动力后,输入推杆开始逐渐克服柱塞和橡胶反馈盘之间的间隙,当柱塞和阀体弹簧座之间的空气阀打开后,前、后腔开始产生压差,这一阶段,输入推杆力主要克服回位弹簧的弹力,踏板推杆力基本保持不变,而控制阀阀体因为随动效应向前推动制动主缸推杆,制动主缸的液压力会急剧的增大,这一阶段定义为跳增阶段。该阶段踏板力不变,输出的最大液压力定义为跳增值。柱塞和橡胶反馈盘之间的间隙越大,跳增值就会越大,但是规定跳增值不能大于300N,跳增值过大时影响真空助力器的随动性,出现脉冲制动现象。对于真空助力器而言,如果其结构及跳增值设计的合理,特性曲线将会从跳增阶段平滑的进入到线性助力阶段。
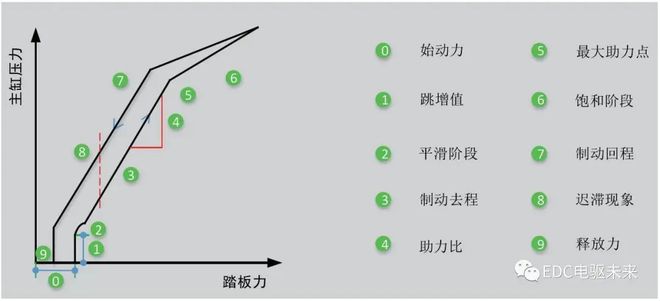
踏板力继续增加,输入推杆继续向前移动,真空助力器进入到线性助力阶段。该阶段有一个真空助力器最重要的参数:助力比,其定义为输出力和输入力的比值,即线性助力段的斜率。当后腔全部充满大气,等于大气压强时,真空助力器具有最大值,该时刻对应助力特性曲线的最大助力点。
